 EN
EN PL
PL
11 sierpnia 2021 r. w Wesołej zostały wręczone nagrody w I edycji konkursu na opracowanie i realizację projektu bezzałogowego systemu powietrznego (BSP) oraz bezzałogowego systemu morskiego (BSM) na potrzeby Wojska Polskiego. W uroczystości wzięli udział minister obrony narodowej Mariusz Błaszczak, rektorzy uczelni wojskowych, w tym rektor-komendant WAT płk prof. dr hab. inż. Przemysław Wachulak, członkowie Kapituły Konkursu oraz laureaci. Łącznie nagrodzono autorów 12 projektów dronów rozpoznawczych, bojowych i amunicji krążącej, w tym 5 z WAT i aż 2 z WEL.
II miejsce w kategorii operacyjno-rozpoznawczej zajęli ex aequo autorzy:
SZYMON KWIECIEŃ
student III roku na kierunku energetyka
PPOR. MGR INŻ. RAFAŁ SZCZEPANIK
absolwent Wydziału Elektroniki WAT
I rok Szkoły Doktorskiej WAT – informatyka techniczna i telekomunikacja
opiekun naukowy: ppłk dr hab. inż. Jan Kelner

Szymon Kwiecień odbiera nagrodę za projekt SOLARPOWER od Ministra Obrony Narodowej Mariusza Błaszczaka 
Ppor. mgr inż. Rafał Szczepanik odbiera nagrodę za projekt ASLER od Ministra Obrony Narodowej Mariusza Błaszczaka
PROJEKT SOLARPOWER
Celem projektu Szymona Kwietnia było stworzenie zdalnie sterowanej/autonomicznej platformy do monitorowania dużego obszaru zainteresowania. W odróżnieniu od tradycyjnych konstrukcji wielowirnikowych, w których czas lotu jest krótki z uwagi na duże zapotrzebowanie energetyczne silników, by utrzymać platformę w powietrzu, w tym przypadku czas lotu został znacząco wydłużony. Odbywa się to z udziałem paneli fotowoltaicznych, które pokryły całą górną powierzchnię skrzydeł. Łącznie zajmują 1.5m2, co stanowi 77% całkowitej powierzchni górnej poszycia. Ich moc maksymalna to 355W. Skrzydło dzieli się na trzy sekcje, z uwagi na duże gabaryty, które utrudniły by późniejszy transport. Każda z sekcji wyposażona jest w pakiet baterii Panasonic NCR18650. W pierwszej i trzeciej sekcji mieści się 18 ogniw połączonych w konfiguracji 3P6S, w drugiej 24 w konfiguracji 4P6S, co łącznie daje 60 ogniw o pojemość 34Ah i napięciu roboczym 22.2V. Dodatkowo każda z sekcji posiada swój niezależny układ kontrolujący proces ładowania i rozładowania (BMS) i przetwornice napięcia step-up służącą do podpięcia napięcia dostarczonego z paneli. Układ BMS możemy maksymalnie obciążyć mocą do 40A (tak samo w przypadku procesu ładowania), co łącznie daję moc na poziomie 120A – pokrywa się to z nadmiarem zapotrzebowania energetycznego wszystkich komponentów elektrycznych wraz z układem napędowym. W przypadku wystąpienia ewentualnego zwarcia w obwodzie elektrycznym, bądź przeciążenia układu, automatycznie odcina on dopływ energii z akumulatorów, by zabezpieczyć model przed przegrzaniem lub pożarem. Przetwornica napięcia ma moc 6A. Zasilać ją można napięciem od 9V do 48V, co pozwala na ładowanie ogniw już przy słabym nasłonecznieniu. Napięcie wyjściowe ustawione jest na wartość 25.2V – optymalne do przebiegu prawidłowego procesu ładowania. Sprawność urządzenia oscyluje przy 96%, co redukuje straty cieplne przy konwersji napięcia. Baterie umieszczone w skrzydłach ładują się automatycznie, nawet po wystawieniu na ekspozycję promieni słonecznych jednej sekcji skrzydła.
Szybowiec został także wyposażony w komputer pokładowy (Raspberry Pi zero W), który łączy się za pośrednictwem protokołu mavlink z autopilotem (pixhawk 4 mini). Wszystkie komponenty elektroniczne zostały zaprojektowane na specjalnej platformie, która wsuwa się w rurę węglową 60x58mm – kadłub. Wszystkie dane telemetryczne transmitowane są przy wykorzystaniu modemu LTE do stacji bazowych. Dostępne na rynku urządzenia nie posiadają statycznego IP, dlatego też lokalizacja sprzętu nadawczego i odbiorczego jest praktycznie niemożliwa. Jedną z opcji jest wykorzystanie VPS, gdzie za pośrednictwem VPN transmitowane są wszystkie dane z BSP do punktu naziemnego. Daje to możliwość stworzenia sieci lokalnej.
Jak mówi laureat: projekt wymagał zaprojektowania i stworzenia ponad 90 modeli 3D rożnego rodzaju elementów – od części konstrukcyjnych po elementy mocowań i osłon. Kosztował wiele godzin pracy, która w efekcie przyniosła niesamowite doświadczenie związane z projektowaniem i całym procesem tworzenia statków powietrznych.

Tworzenie w warunkach domowych konstrukcji SOLARPOWER 
Gotowa konstrukcja motoszybowca SOLARPOWER 
Wydrukowane i skompletowane mocowanie komponentów elektronicznych 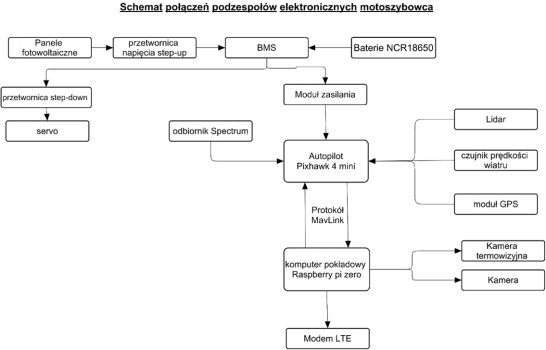
Schemat połączeń podzespołów elektronicznych motoszybowca



PROJEKT ASLER
Autonomiczny System Lokalizacji Emiterów Radiowych (ASLER) opracowany przez ppor. mgr inż. Rafała Szczepanika to autonomiczny bezzałogowy system powietrzny (BSP), którego zadaniem jest estymacja pozycji, czyli wyznaczania współrzędnych położenia lokalizowanych obiektów (nadajników/emiterów/źródeł emisji) radiowych. Funkcjonalność taka jest podstawą systemów rozpoznania i walki radioelektronicznej, a także wielu systemów radionawigacyjnych. Podstawą procedury lokalizacyjnej systemu ASLER jest dopplerowska metoda lokalizacji zwana również metodą SDF (Signal Doppler Frequency), która bazuje na analitycznym opisie efektu Dopplera. W 2006 roku, metoda SDF została opracowana w Instytucie Systemów Łączności Wydziału Elektroniki WAT, gdzie jest cały czas rozwijana. Jej cechą charakterystyczną jest wykorzystanie pojedynczej ruchomej platformy do lokalizacji. Metoda SDF daje ponadto możliwość jednoczesnej lokalizacji wielu źródeł emisji, co stanowi innowacyjny wyróżnik w stosunku do innych rozwiązań tej klasy. ASLER to pierwsza autonomiczna implementacja metody SDF na platformie latającej.
System ASLER integruje odbiornik radiokomunikacyjny NI USRP B200mini bazujący na technologii radia programowalnego (SDR, Software-Defined Radio) oraz pokładowy odbiornik GPS (Global Positioning System), który dostarcza informacji o bieżącej prędkości i pozycji BSP. Za integrację odpowiada dedykowana aplikacja pracująca na lokalnym mikrokomputerze typu Raspberry Pi, która umożliwia zapis danych pomiarowych na karcie pamięci microSD (Micro Secure Digital) lub przesłanie ich do wskazanego serwera poprzez sieć GSM (Global System for Mobile Communications). Obecnie wersja systemu jest demonstratorem technologii opracowanym na V poziomie gotowości technologicznej (5TRL, 5th Technology Readiness Level). W tym przypadku, analiza danych pomiarowych jest realizowana po zakończeniu misji w procesie przetwarzania końcowego, który zapewnia wykreślenie trajektorii ruchu BSP oraz pozycji lokalizowanych emiterów radiowych na mapie cyfrowej.
Sensor radiowy na BSP może ponadto pełnić funkcję sensora monitorującego aktywność określonych emiterów lub zajętość widmową określonych kanałów radiowych. W tym przypadku, ASLER daje możliwość budowania świadomości sytuacji elektromagnetycznej. Dzięki zastosowaniu odbiornika SDR pracującego w paśmie od 70 MHz do 6 GHz, ASLER może monitorować spektrum radiowe w szerokim zakresie częstotliwości, co wskazuje na jego uniwersalne zastosowanie. Wykorzystanie technologii SDR daje możliwość łatwego sterowania odbiornikiem i dostosowanie jego parametrów do celów misji. Typowa misja rozpoznawcza z wykorzystaniem systemu ASLER polega na przelocie BSP po wyznaczonej trajektorii ruchu (tj. trasie pomiarowej), na której następuje rejestracja sygnału radiowego pochodzącego od lokalizowanego źródła sygnału. Zarejestrowany sygnał poddany zostaje analizie widmowej, która pozwala na wyznaczenie dopplerowskiego przesunięcia częstotliwości. Zmiana tego parametru wraz z dodatkowymi danymi o prędkości i położeniu BSP jest następnie wykorzystana w metodzie SDF do estymacji położenia lokalizowanego emitera radiowego. Przelot BSP musi odbywać się w takiej odległości od lokalizowanego obiektu, która zapewni odbiór jego sygnału powyżej czułości zastosowanego odbiornika SDR.

Autonomiczny System Lokalizacji Emiterów Radiowych (ASLER) 
Pilot wraz z tabletem do sterowania bezzałogowym statkiem powietrznym 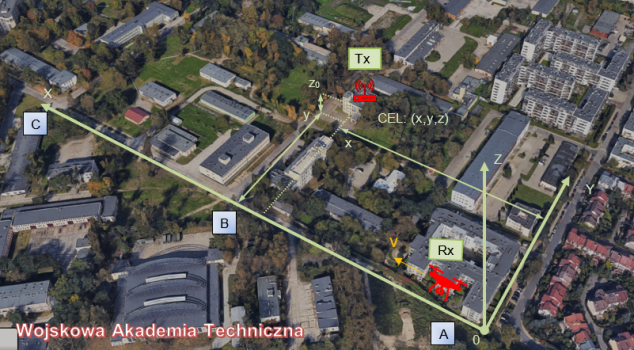
Scenariusz pomiarowy badań przeprowadzonych przez ppor. Rafała Szczepanika 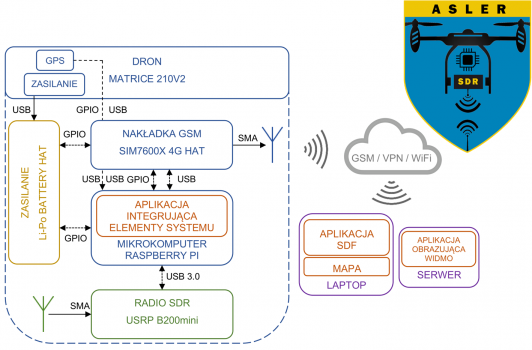
Schemat blokowy opracowanego systemu



